Learn & Build LLM Powered Applications
Here's some of my recent work
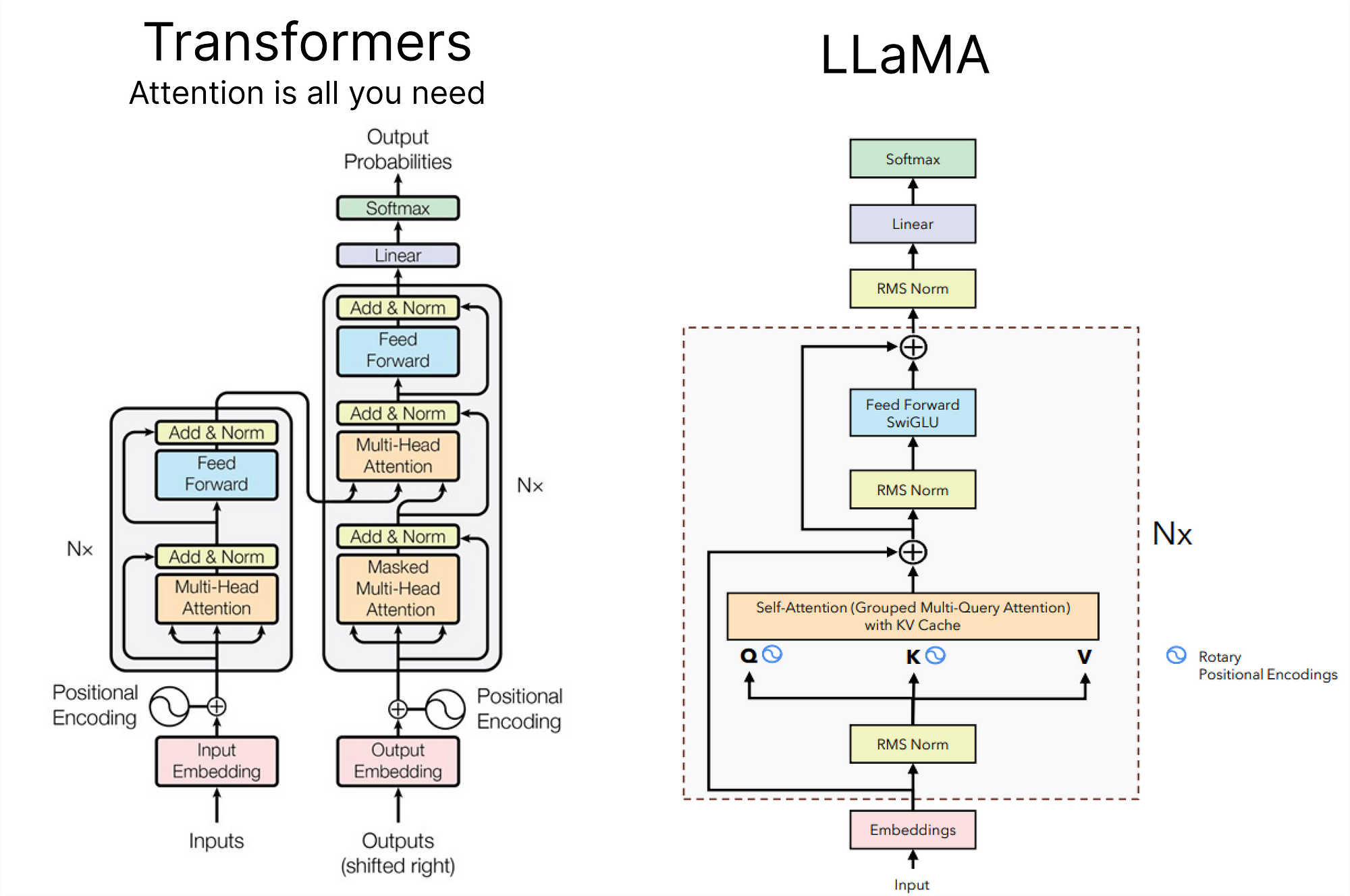
An open source GPT-based model implementation using PyTorch, such as Llama & Mistral. Aim is to gain practical expertise in training and deploying these models to production, as well as a theoretical understanding of the underlying working principles.
Feel Free to Contact
Pune, India
davechirav@yahoo.com